今年のCCTV春節晩会で、松延動力が開発したバイオニックロボット「偽蔡明」が登場。蔡明の容貌を忠実に再現し、コント『おばあちゃんのお気に入り』で共演。表情が本物そっくりで、観客も役者も見分けがつかないほど。番組後、蔡明に記念品として贈られる。....
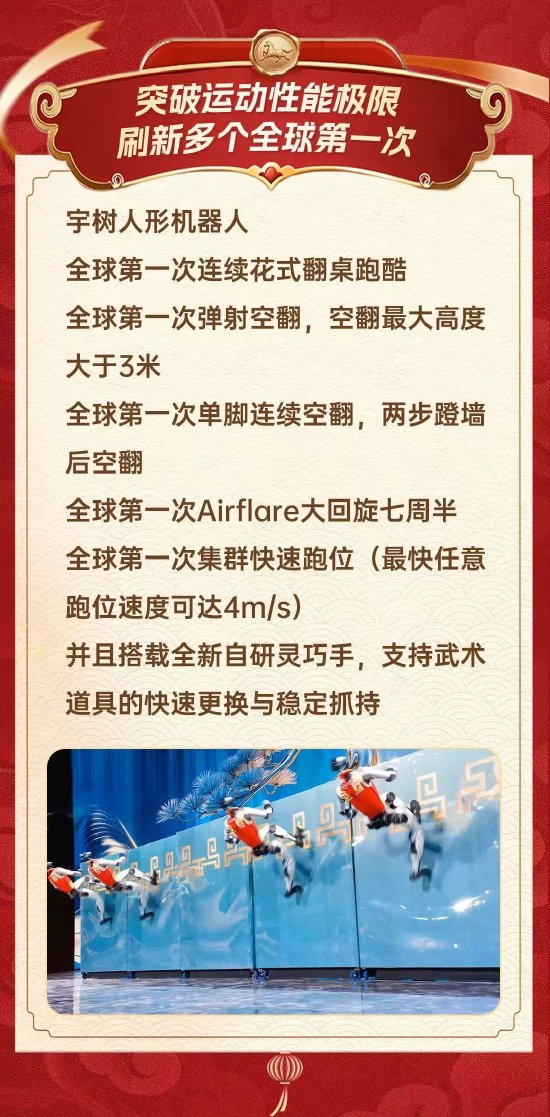
2026年の春節晩会において、宇樹の人型ロボットが子供と共に武術「舞 BOT」をパフォーマンスし、複数の運動限界を突破しました。空中フリップの高さは3メートル以上、片足での連続空中フリップ、最高速度4m/sでの移動を実現し、宙返りやつるぎの振りなど高難易度の動きも行い、優れた安定性と柔軟性を示しました。
アンソロピック社は哲学博士のアマンダ・アスケルを起用し、AIチャットボット「Claude」の人格と倫理体系を構築。非技術的手法で独自の道徳基準を確立し、AIに「デジタルな魂」を宿す試みが注目されている。....
OpenAIは、プロンプトインジェクション攻撃のリスクに対応するため、ChatGPTに2つの新しい高級なセキュリティ対策を追加しました。新対策は既存のセキュリティシステムに基づいており、サンドボックス機能やURLデータ漏洩防止機能を含んでいます。最初の対策は、高いセキュリティ要件を持つユーザー向けの選択可能なロックダウンモードで、第三者がAIに悪意ある指令を実行させたり、機密情報が漏洩したりすることを防ぐことを目的としています。
OpenClawの公式デプロイメントプラットフォームで、AIロボットをワンクリックでデプロイでき、サーバー設定やDevOpsが不要です。
プロフェッショナルなローカルストーリーボードワークステーション。動画のインポート、AI分析と生成をサポートしています。
AIワールドジェネレーターは、ゲーム、研究、ロボット分野に使用するため、秒単位でインタラクティブな3Dワールドを生成できます。
オープンソースのウェブサイトトラフィック分析プラットフォームで、AIロボットによるトラフィックを検出し、企業の運用最適化を支援します。
Google
$0.49
入力トークン/百万
$2.1
出力トークン/百万
1k
コンテキスト長
Openai
$2.8
$11.2
Xai
$1.4
$3.5
2k
$7.7
$30.8
200
-
Anthropic
$105
$525
$0.7
$7
$35
$17.5
$21
Alibaba
Baidu
128
$6
$24
256
$4
$16
$2
$20
Bytedance
$1.2
$3.6
4
$3.9
$15.2
64
onnx-community
SAM3は概念ベースの任意分割モデルで、入力された点やボックスなどのプロンプト情報に基づいて、正確な画像分割マスクを生成することができます。このバージョンはONNX形式のSAM3トラッカーモデルで、Transformers.jsライブラリを通じてブラウザ環境で効率的に動作します。
facebook
SAM 3はMetaが発表した第3世代のプロンプト可能な分割ベースモデルで、テキストまたはビジュアルプロンプト(点、ボックス、マスク)を利用して、画像とビデオ内のオブジェクトを検出、分割、追跡することができます。前代と比較して、SAM 3はオープンボキャブラリ概念のすべてのインスタンスを詳細に分割する機能を導入し、大量のオープンボキャブラリプロンプトをサポートし、SA - COベンチマークで人間の性能の75 - 80%を達成しています。
Tacoin
これはTacoinがNVIDIA GR00Tモデルをベースに、LIBERO libero longベンチマークテストで微調整したロボット操作モデルです。このモデルはデュアルRGBストリームと8自由度の状態入力を採用し、16ステップの関節空間動作を予測でき、長期的な視野のロボット操作タスクに特化しています。
lerobot
π₀.₅はPhysical Intelligenceによって開発された視覚 - 言語 - 動作モデルで、オープンワールド汎化能力を備えており、訓練時に一度も見たことのない全く新しい環境やシーンでロボットタスクを実行することができます。
VLA-Adapter
VLA-Adapterは、Libero-Spatial上で訓練されたマイクロビジョン言語アクションモデルで、Prismatic-VLMアーキテクチャを採用し、大規模言語モデルのバックボーンとしてQwen2.5-0.5Bのみを使用しています。このモデルは、ロボットのベンチマークテストで、パラメータ規模がより大きいオープンソースのVLAモデルを上回り、高性能なビジョン - 言語 - アクションの理解と実行を実現しています。
AdilZtn
SmolVLAはコンパクトで効率的な視覚言語アクションモデルで、計算コストを削減しながら競争力のある性能を達成し、消費者向けハードウェアにデプロイできます。このモデルはLeRobotを使用してトレーニングされ、ロボット技術アプリケーション向けに設計されています。
neuphonic
NeuTTS Airは世界初の即時音声クローニング機能を備えた超リアルなデバイス端テキスト音声変換(TTS)言語モデルです。0.5Bの大規模言語モデルのバックボーンネットワークをベースに構築され、ローカルデバイスに自然な音声、リアルタイム性能、組み込みセキュリティ機能、話者クローニング機能をもたらします。
NiryoTeam
SmolVLAはコンパクトで効率的な視覚言語行動モデルで、計算コストを削減しながら競争力のある性能を実現し、消費者向けハードウェアにデプロイすることができます。このモデルはLeRobotによってトレーニングされ、ロボット技術タスク向けに設計されています。
jamescallander
これはRockchip RK3588開発ボード用に最適化されたコード生成モデルで、Qwen2.5-Coder-3B-Instructから変換され、エッジデバイスでのローカルコード支援と生成タスクをサポートします。
GeniusJunP
SmolVLAはコンパクトで効率的な視覚-言語-行動モデルで、計算コストを削減しながらも競争力のある性能を維持でき、消費者向けハードウェアに適しています。このモデルはLeRobotフレームワークを使用してトレーニングされ、ロボット技術タスクに特化して最適化されています。
SmolVLAはコンパクトで効率的なビジュアル - 言語 - アクションモデルで、計算コストを削減しながらも競争力のある性能を発揮し、コンシューマ向けハードウェアにデプロイできます。このモデルはLeRobotフレームワークを使用してトレーニングされ、ロボット技術のアプリケーション向けに設計されています。
wcy1122
MGM-Omni-TTS-2BはMGM-Omni全機能チャットボットの音声生成コンポーネントで、テキストから音声への変換に特化しています。中英語のゼロサンプル音声クローニングをサポートし、10分以上の流暢で自然な音声を生成でき、効率的なストリーミングオーディオ生成を実現します。
NexaAI
OmniNeuralは、世界初のニューラル処理ユニット(NPU)用に特別に設計された全マルチモーダルモデルで、テキスト、画像、音声をネイティブに理解し、PC、モバイルデバイス、自動車、IoT、ロボットなどの様々なデバイスで動作します。
allenai
MolmoActはアレン人工知能研究所によって開発されたオープンソースのロボット操作動作推論モデルで、Qwen2.5 - 7BとSigLip2視覚バックボーンネットワークに基づいて構築され、家庭およびデスクトップ環境における片腕のフランカロボット操作タスクに特化して最適化されています。
MolmoActは、アレン人工知能研究所によって開発された完全なオープンソースのロボット操作アクション推論モデルで、Qwen2.5 - 7BとSigLip2の視覚バックボーンネットワークに基づいて構築され、家庭やデスクトップ環境でのロボット操作タスクに特化しています。
MolmoActはアレン人工知能研究所によって開発されたオープンソースの行動推論モデルで、ロボット操作タスクに特化しています。このモデルはQwen2.5 - 7BとSigLip2をベースに構築され、家庭およびデスクトップ環境における93種類の操作タスクで訓練され、優れた視覚 - 言語 - 行動処理能力を持っています。
MolmoActはアレン人工知能研究所によって開発されたオープンソースの動作推論モデルで、ロボット操作タスクに特化しています。このモデルはQwen2.5 - 7BとSigLip2ビジュアルバックボーンネットワークに基づいており、家庭およびデスクトップ環境の93種類の独特な操作タスクで訓練され、優れたビジュアル - 言語 - 動作推論性能を持っています。
nbirukov
拡散戦略に基づく視覚運動制御モデルで、ロボット制御を生成拡散プロセスと見なし、滑らかな多段階動作軌跡を生成でき、富接触操作タスクで優れた性能を発揮します。
MGM-Omni-7Bは全モーダルチャットボットで、テキスト、画像、ビデオ、音声入力を処理し、テキストと音声の応答を生成することができます。長音声の理解と生成能力を備え、中英語のゼロサンプル音声クローンもサポートしています。
nvidia
Cosmos-Predict2.5はNVIDIAが開発した、物理AI向けに設計された高性能の事前学習済み世界基礎モデルセットです。拡散モデル技術に基づいており、テキスト、画像、またはビデオの入力に基づいて、物理的な知覚を持つ高品質の画像とビデオを生成することができ、自動運転やロボットなどのアプリケーションに世界シミュレーション能力を提供します。
Runnoは、JavaScriptツールキットのセットで、ブラウザやNode.jsなどの環境で複数のプログラミング言語のコードを安全に実行するためのものです。WebAssemblyとWASIを通じてサンドボックス化された実行を実現し、Python、Ruby、JavaScript、SQLite、C/C++などの言語をサポートし、Webコンポーネント、MCPサーバーなどの統合方法を提供します。
このプロジェクトはKali Linux用に設計されたMCPサーバーの集合で、逆エンジニアリング、セキュリティテスト、自動化ワークフローを強化することを目的としています。Nmap、Wiresharkなどのツールを統合し、Dockerサンドボックスをサポートしています。
安全なDockerコンテナコードサンドボックス環境で、AIアプリケーションに隔離された実行空間を提供し、複数のプログラミング環境とファイル操作をサポートします。
ClippyはmacOSターミナルのクリップボードツールで、ファイル参照のコピー、GUI貼り付け、最近のダウンロード管理、パイプラインデータ処理、およびMCPサーバーのAI統合をサポートし、作業効率を向上させます。
仕様駆動型開発に基づくAI支援ソフトウェア開発ワークフローツールで、リアルタイムダッシュボードを通じてプロジェクトの進捗状況と文書管理を監視します。
このプロジェクトは、Node.jsベースのMCPサービスアーキテクチャを展示しており、バックエンドAPIサービス、MCPサーバー、およびクライアントAIチャットボットが含まれています。MCPサーバーはAPIアクセス方法を標準化し、クライアントはMCP機能を統合することでカスタムデータストレージ機能を実現しています。
MCPシステムブリッジは、モデルコンテキストプロトコル(MCP)を実装したブリッジツールで、クリップボード管理、URL処理、日付情報の取得など、オペレーティングシステムのネイティブ機能にアクセスできます。
COZE MCPサーバーは、Cozeのリソースとツールを提供するモデルコンテキストプロトコルサーバーで、ワークスペース管理、ロボットの作成と対話などの機能をサポートします。
Dockerベースの安全なコード実行環境で、MCPプロトコルに隔離サンドボックスのサポートを提供します。
これは自動化デプロイスクリプトプロジェクトで、Windowsシステム上で複数のモデルコンテキストプロトコル(MCP)ロボットサービスをインストールおよび構成するためのもので、ファイルシステム、GitHub、検索、メモリ管理などの機能を提供し、詳細なインストールガイドとトラブルシューティング方法も提供します。
スリーパーAPI MCPサーバーは、スリーパーのファンタジーフットボールプラットフォームのデータアクセスを提供するモデルコンテキストプロトコルサービスで、ユーザー情報、リーグデータ、ドラフト詳細、選手情報などの機能をサポートし、APIキーなしで読み取り専用データにアクセスできます。
パズルボックスは、MCPプロトコルに基づくサーバーで、マルチエージェントシステム内の有限状態機械(「パズル」と呼ばれます)を管理および調整するために使用され、動的リソースのサブスクライブと状態の更新をサポートします。
CoCubeスマートプログラミングロボットのMCPサーバー
RustベースのMCPサーバーで、深いコードインテリジェント分析を提供し、16種類のプログラミング言語のシンボル抽出、セマンティック検索、セキュリティ分析、サプライチェーンセキュリティなどの機能をサポートし、プライバシーとパフォーマンスに重点を置いています。
Qwen MCPツールは、モデルコンテキストプロトコルに基づくサーバーで、Qwen CLIとAIアシスタントを統合し、大規模コンテキストウィンドウ分析、ファイル処理、サンドボックス実行、複数モデルサポートなどの機能を提供します。
Devici MCPサーバーは、Devici APIとのインタラクションに使用されるモデルコンテキストプロトコルサーバーで、ユーザー、コレクション、脅威モデル、コンポーネント、脅威、緩和策、チーム、ダッシュボードデータの管理にLLMツールを提供します。
MCP-ChatBotは、モジュール式能力プロトコル(MCP)に基づくチャットボットアプリケーションで、コンテナ化アーキテクチャを通じて天気サービスとGPT - 4oモデルを統合し、自然言語対話機能を提供します。
ros2-mcp-serverはPythonベースのサーバーで、Model Context Protocol (MCP)を通じてROS 2と統合され、AIアシスタントがROS 2トピックを通じてロボットの動きを制御できるようにします。時間制御の移動コマンドをサポートし、ROS 2ノードとして動作し、geometry_msgs/Twistメッセージを/cmd_velトピックに発行します。
Puppeteer-Extraに基づくMCPサーバーで、強化されたブラウザ自動化機能を提供し、ロボットとして検出されるのを避けるための隠れモードをサポートします。
ElectronベースのPerplexity AIデスクトップアプリで、完全なシステム権限と機能を備え、クリップボード操作、ドラッグアンドドロップ機能、音声メディア権限などが含まれます。
 Transformers英語
Transformers英語%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)